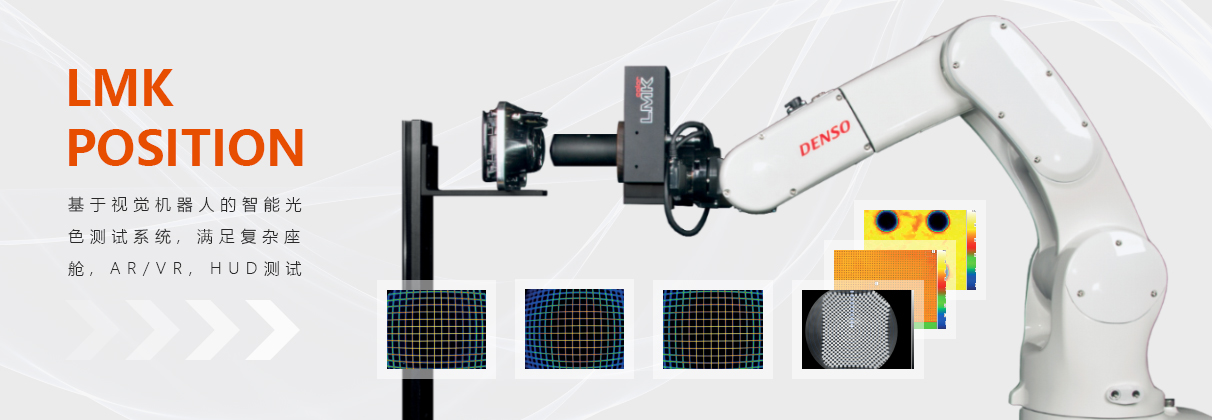
采用LMK 5 成像式亮度计进行Black Mura测试
Mura 测试方法现状
基于物理测量进行视觉表现评价,“spatial standard observer”是一个非常好的评价方法。“spatial standard observer”在美国Watson专利中有具体的描述。该方法原理非常清楚,但是有很多的算法和需要评价的参数,这使得采用该方法进行可比较的测试成为不可能的事情。
此外,还需要考虑人眼的CSF函数。CSF认为人眼是否可以识别一个物体,取决于空间频率的变化。许多文献中可以看到有许多不同的方法应用该模型进行Mura评价。然而,问题在于,对于人眼,并没有一个单一的CSF。CSF取决于视觉条件的很多因素,尤其是亮度水平。
Mura原理的视频学习资料:
最近的一些文献提供了一些非常复杂的算法,用于Mura检测,通常是基于梯度评价,高通滤波以及一些阈值操作和基于空间域的分类。也有一些方法采用FFT算法结合专门设计的空间域滤波方法。
根据德国车载行业液晶显示器之Mura 均匀性测试规范,可对所有样品的亮度画面进行分析,并针对黄斑现象,提取色温分布图,并进行对应的分析
测试方法与要求
Mura作为近年热门测试内容,已经为许多业者采用,如前所述,并没有一个统一认可的测试规范和分析方法。德国车载行业的显示器测试标准是目前所知唯一一个完成并被行业采用的统一的测试标准,已经在主机厂(奔驰、宝马、奥迪、大众),配套厂(大陆汽车、博世、阿尔派),面板制造商(夏普、群创、友达、三星、LG、京东方、天马等)广泛接受和使用。
由于车载与机载显示器有许多应用上共同之处,是非常值得借鉴的成熟的测试犯规。
德国车载液晶显示器均匀性测试规范分为几个部分
1) 对相机的要求:
光谱匹配误差<5%
平场均匀性< 2%
可以与显示器频率同步
2) 测试条件
相机与被测面板中心同轴
相机像面与面板平行,倾斜角小于0.5°
调制度30%-80% ,无摩尔干涉条纹
调整步骤结束后,图像坐标直接转为绝对长度单位mm
软件自动计算相机像素与显示器像素的比例关系,并在图像处理过程种直接对应到显示器实际像素数目(可设定液晶像素数目)。
采用一一对应的相机对准画面,精确定位相机
3) 测试指标与规范要求
白画面亮度均匀性
>80%
黑画面亮度均匀性
>50%
最大相对白画面亮度梯度值
< 0.004% / Display pixel
最大相对黑画面亮度梯度值
< 2.0% / Display pixel
采用相对亮度梯度而不是绝对梯度值,避免了对不同亮度屏幕测试数据无法直接对比的缺点。
4) 图像处理
均匀性:在亮度图像里,根据10X10个液晶像素的对应的像素大小作为一个亮度测试点,在整个画面中无缝扫描模拟点亮度计,寻找亮度最大值和最小值,并排除距离边缘小于10个液晶像素的区域。
BlackMura:首先根据亮度画面进行图像处理,得到亮度梯度图(具体算法请参考BlackMura V115),由于不同亮度显示器的亮度变化绝对值与显示器本身的亮度水平有关,因此采用梯度值除以白画面或黑画面的平均亮度值作为相对梯度值,并规定了画面的最高相对梯度值作为Mura合规与否的标准。标准中优先使用相对与白画面的相对梯度值作为Mura指标。
图像处理过程:图像处理过程中,一切均有程序自动分析,也可圈定有效显示画面即可。有些处理算法为人工选择mura区域,然后进行量值分析不同。
车载液晶Mura测试标准解读与实际操作:
相关产品:







 解决方案
解决方案





